数字信号处理
傅里叶变换
前置知识
公式一:计算原向量投影后的坐标
即:
表示在向量u在i坐标系下的坐标。
\begin{bmatrix} \end
公式二:用新的基函数和坐标复原原向量
即:
空间坐标变换总结
- 坐标系中的基向量,由两两正交(内积为零)且长度为1的n(n为空间维度)个向量组成。
- 坐标系中任意一个向量可表示为基向量的线性组合,其系数即为坐标。
- 向量丛一个坐标系变换到另一个坐标系,需要求向量在新坐标系的每个基向量的投影。
向量的内积(投影)
其他补充文章:👉️向量的内积外积与其几何意义👈️ 假设有一个k维的向量u,这个k维向量在某个基向量
一般来说
有因为 为基向量,故有(3)式成立
那么如果把向量的维度看作成数组,就可以计算两数组之间的内积。
如果把数组中n的间隔逐渐变得密集,就可以看作成函数,从而计算两函数之间的内积。
函数内积(两个无穷维向量的投影)
参考链接:
将(4)式理解成对应点的值相乘再求和的极限形式
当取值密度趋向于无穷大时,得到(4)式积分形态
积分变换
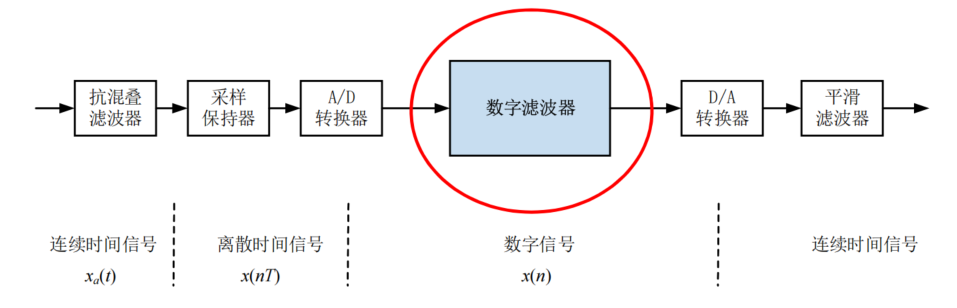
第一章 绪论
四种信号类型
- 连续时间信号
- 离散时间信号
- 模拟信号
- 数字信号
| 信号类型 | 时间 | 幅度 |
|---|---|---|
| 连续时间信号 | 连续 | 可连续、可离散 |
| 离散时间信号 | 离散 | 可连续、可离散 |
| 模拟信号 | 连续 | 连续 |
| 数字信号 | 离散 | 离散 |
三种频率的关系
- 模拟频率
- 模拟角频率
- 数字频率
- 模拟信号$x_a(t) = Acos(2\pi ft+\phi) $
- 模拟频率
- 模拟角频率
- 数字信号
- 数字频率
- 采样周期
<==> 采样率
数字频率
第二章 离散时间信号与系统
奈奎斯特采样定理
若
条件:
- 带宽有限
- 理想采样
tip: 采样频率
这是一个分割线~
例题:
解得:
解得:
解得:
这是一个分割线~
结论:
实际采样与理想采样的异同
本质不同 ==> 采样序列不同:采样序列由单位冲激串变为矩形脉冲串
相同点:周期延拓仍为
不同点:幅度加权因子由
插值重构
理想低通滤波器的截止频率满足:
tip: 采样频率
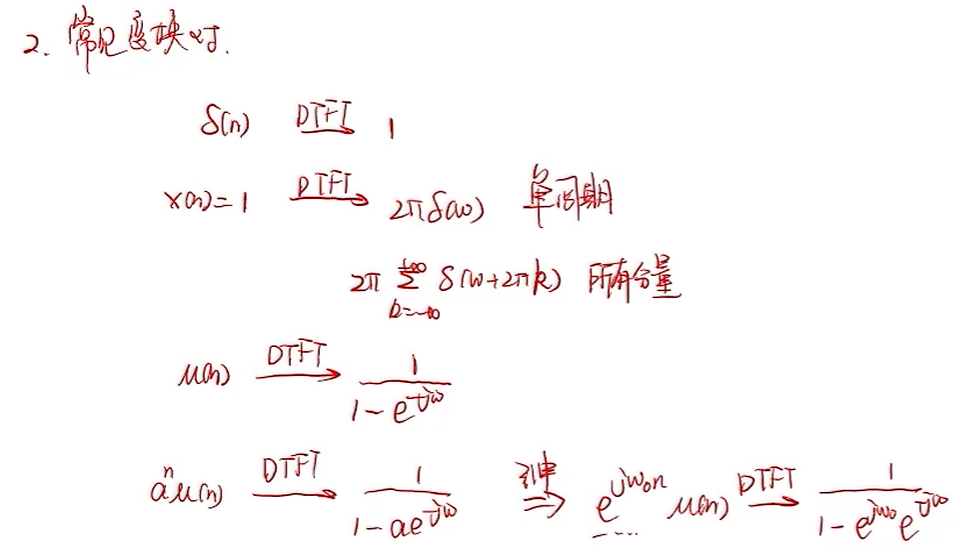
典型序列
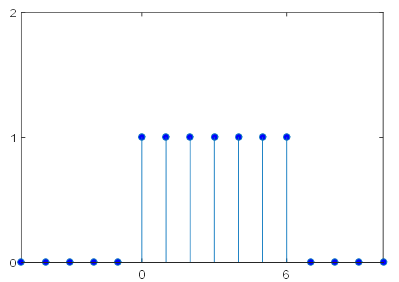
1.矩形序列
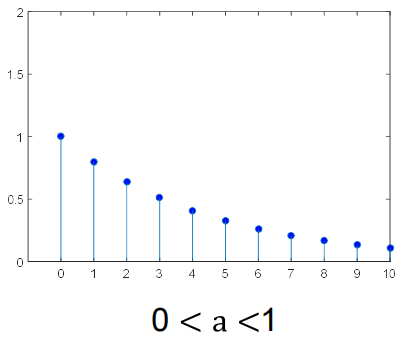
2.实指数序列
3.复指数序列
4.正弦型序列
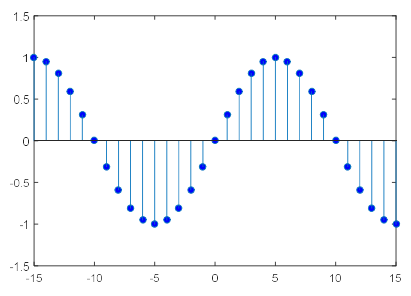
序列的周期性
定义:如果对于所有的n,存在一个最小的正整数N
则称序列x(n)为周期序列,其周期为N。
这是一个分割线~
例题:计算
找最小公倍数,对第一个sin有:
对第二个sin有:
解得:周期为15
序列运算
卷积:
1.有限长序列:
使用冲激法计算卷积
写了一个简陋的冲激法实现,仅供理解
#include<iostream>
#include<algorithm>
#include<cstring>
using namespace std;
const int N = 100010;
int a[N], b[N];
int n, m;
int ans[N];
int main()
{
cin >> n;
for(int i = 0; i < n; i ++) cin >> a[i];
cin >> m;
for(int i = 0; i < m; i ++) cin >> b[i];
for(int i = 0; i < n; i ++)
{
for(int j = 0; j < m; j ++)
{
ans[i + j] += a[i] * b[j];
cout << a[i] * b[j] << ' ';
}
cout << endl;
}
for(int i = 0; i < n + m - 1; i ++) cout << ans[i] << ' ';
return 0;
}
//目的:计算{1, 1, 2}0 * {1, 2, 3, 4}0
//输入
//3
//1 1 2
//4
//1 2 3 4
//结果
//1 2 3 4
// 1 2 3 4
// 2 4 6 8
//1 3 7 11 10 8系统性质
- 线性:输入为线性组合 ==> 输出同线性组合
- 时不变:输入时延 ==> 输出同时延
- 因果 常用判定:系统输出仅与当前或过去值有关
LTI独有判定:满足或 收敛域向外的,包括 则是因果系统 - 稳定 常用判定:有限输入 ==> 有限输出
LTI独有判定:满足有限 或 收敛域包含单位圆 则是稳定系统
Tips:
LTI(Linear Time-invarient)系统 线性时不变系统
性质:
存在冲激响应
输入为
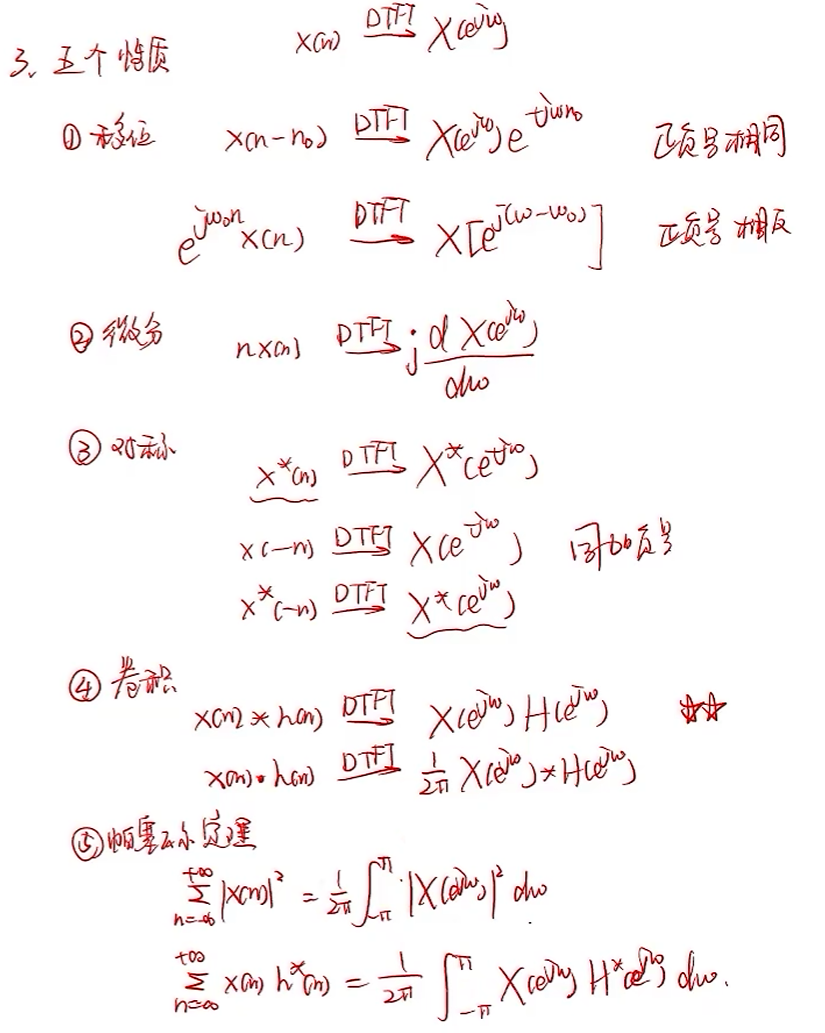
DTFT
1.定义:
正变换:
反变换:
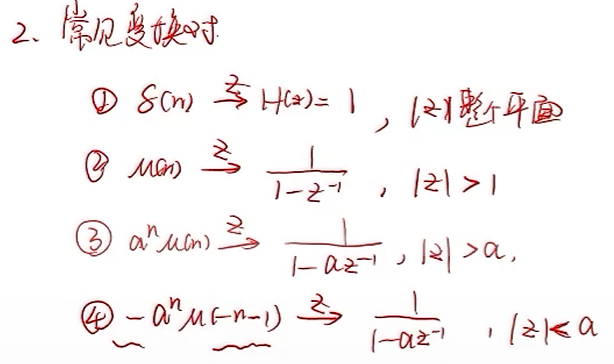
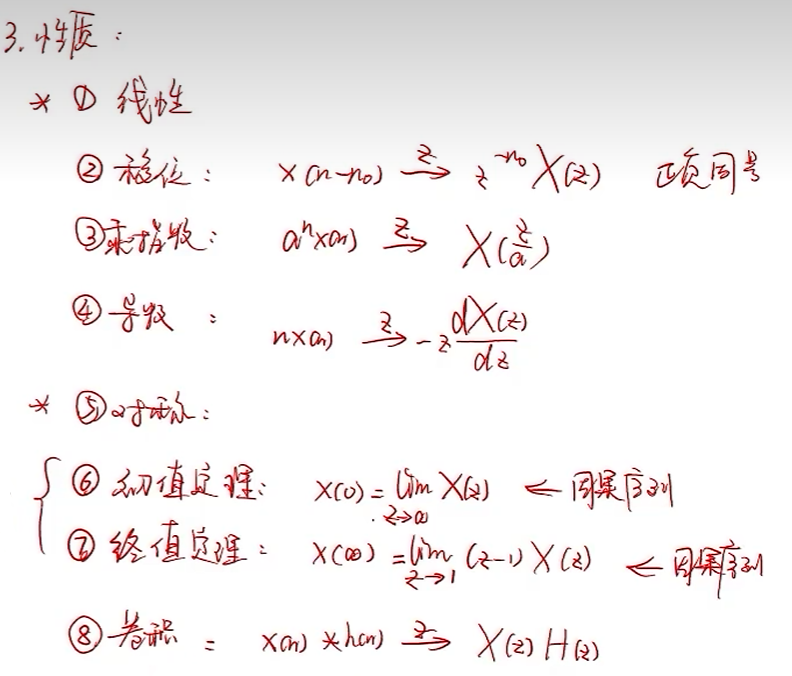
Z变换
1.定义:
正变换:
收敛域:
第三章 离散傅里叶变换
DFS
正变换:
反变换:
DFT
正变换:
反变换:
圆周卷积
N点圆周卷积:
计算方法:
1.先算线性卷积 2.再剪断,补充相加 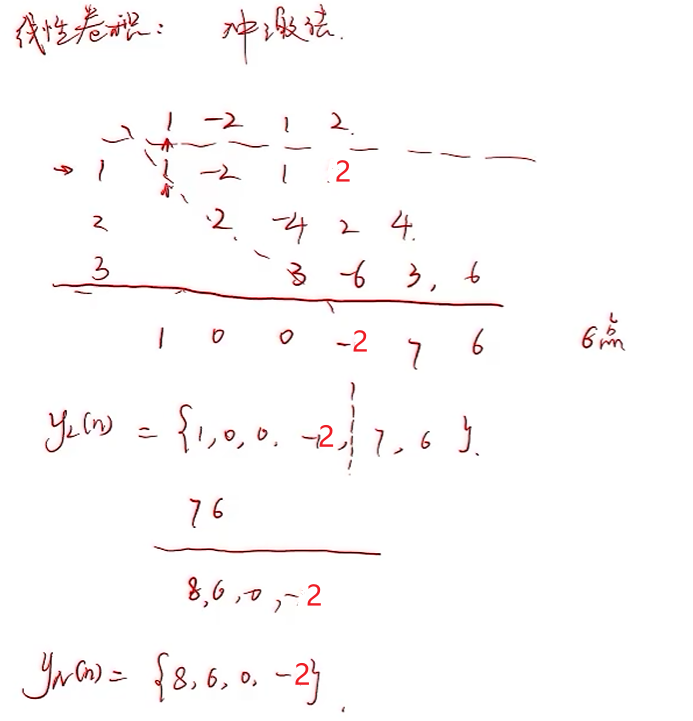
第四章 DFT应用
重叠相加法与重叠保留法
直接上例题:
序列x(n)={1,2,3,4,5,6,7,8,9,10}0,h(n)={1,2,-1}0,请利用重叠相加法计算x(n)和h(n)的线性卷积结果。
计算各段线性卷积结果,
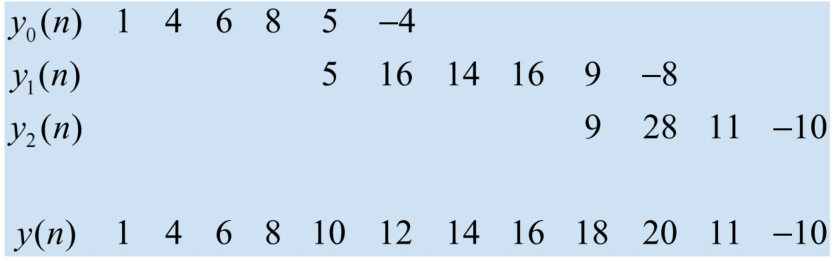
这是一个分割线~
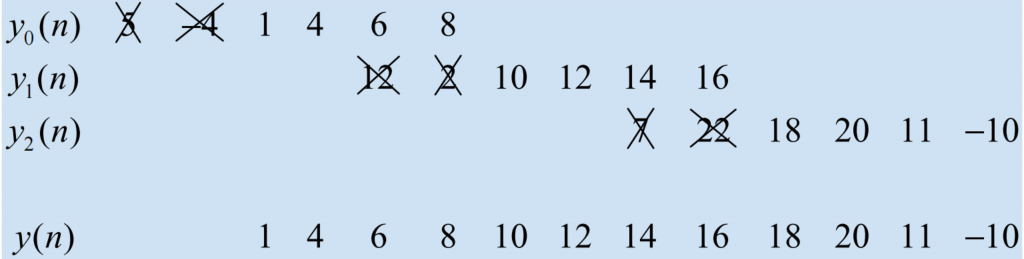
请利用重叠保留法重新计算。
把
计算各段圆周卷积结果
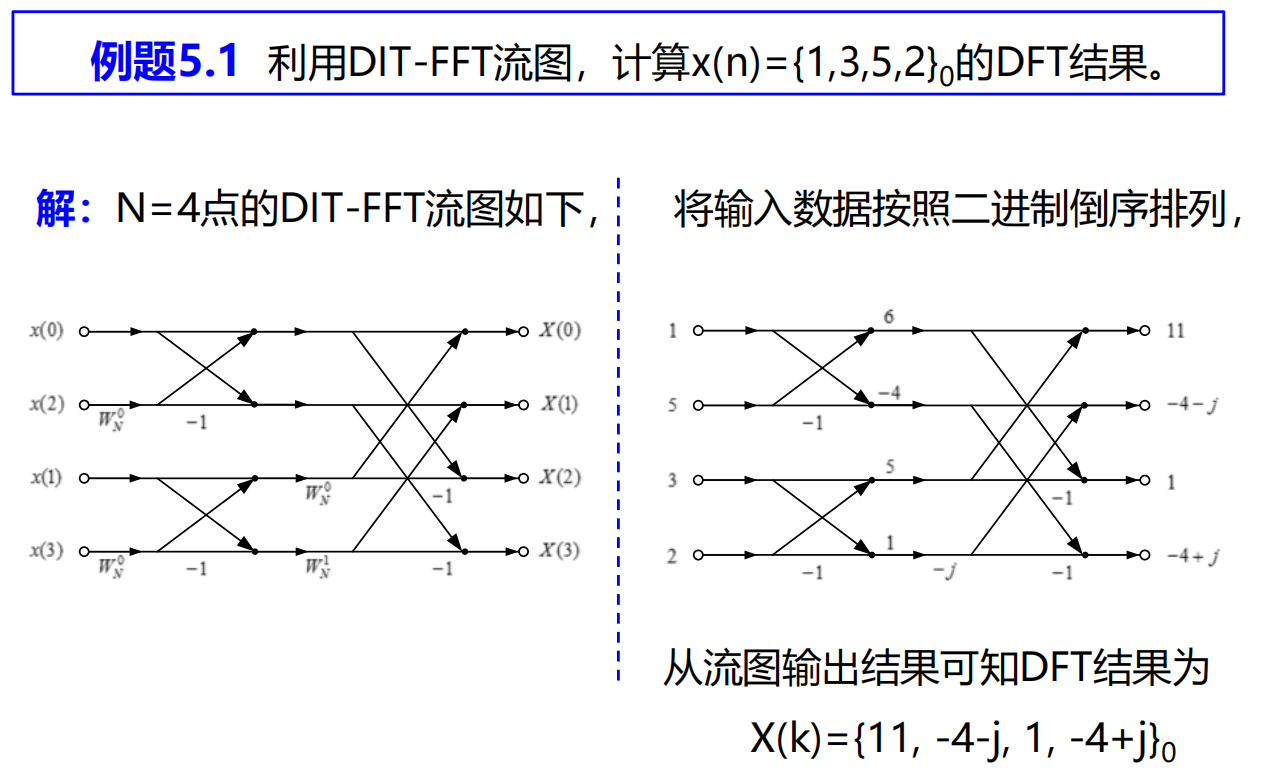
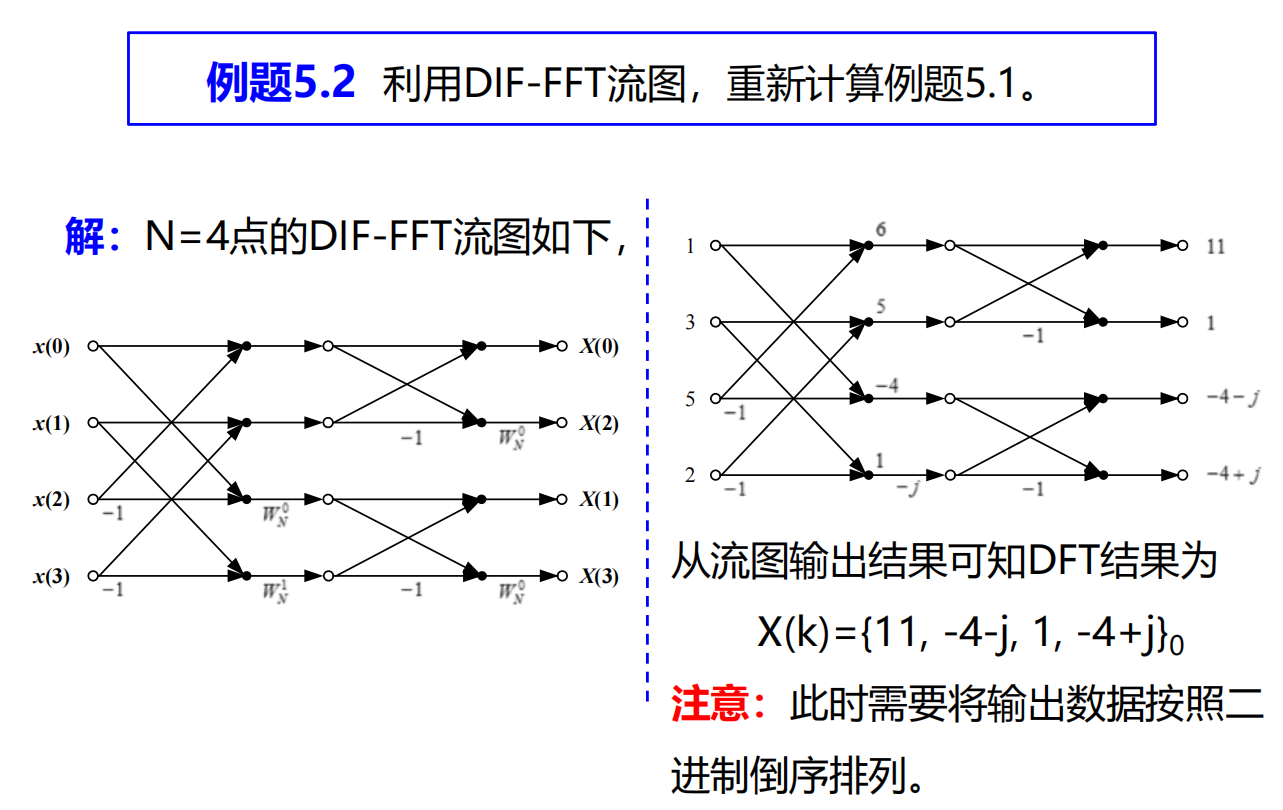
第五章 FFT
DIT-FFT
DIF-FFT
第六章 IIR数字滤波器的设计
脉冲响应不变法求解系统函数
两个重要结论:
双线性变换法求解系统函数
记住变换公式即可:
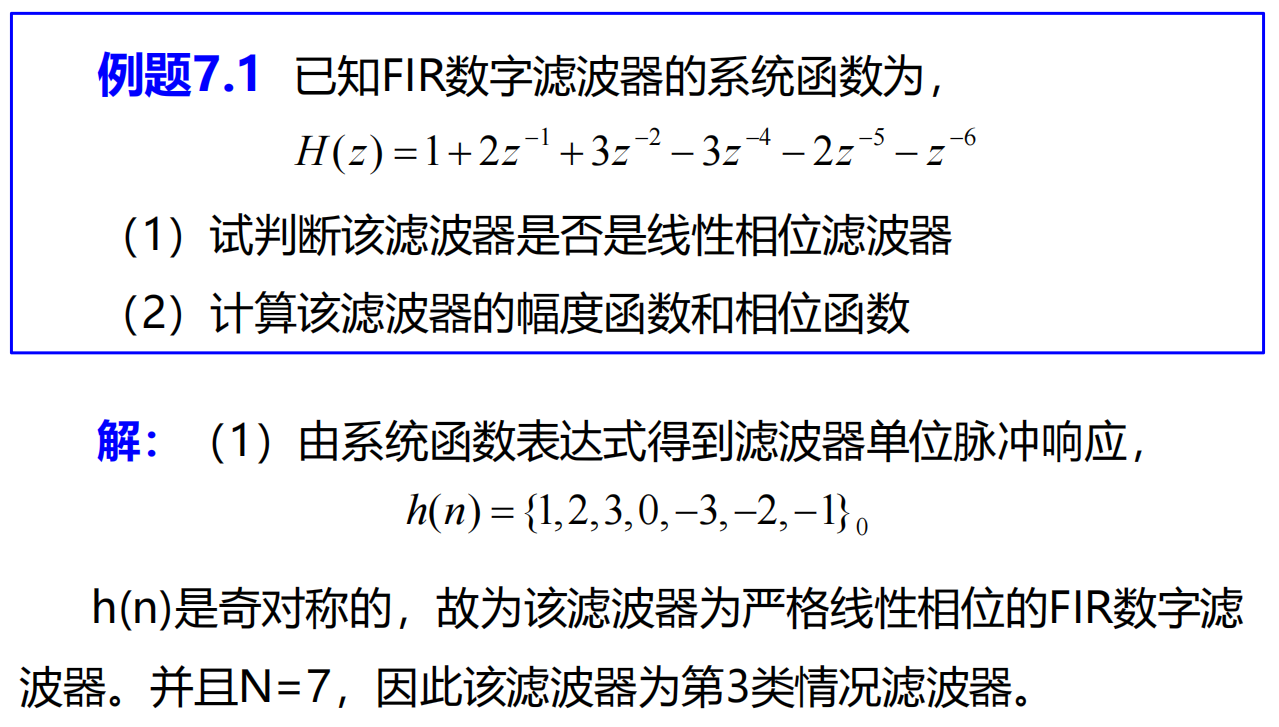
第七章 FIR数字滤波器的设计
线性相位
第一类线性相位:
第二类线性相位:
四类线性相位FIR数字滤波器特点
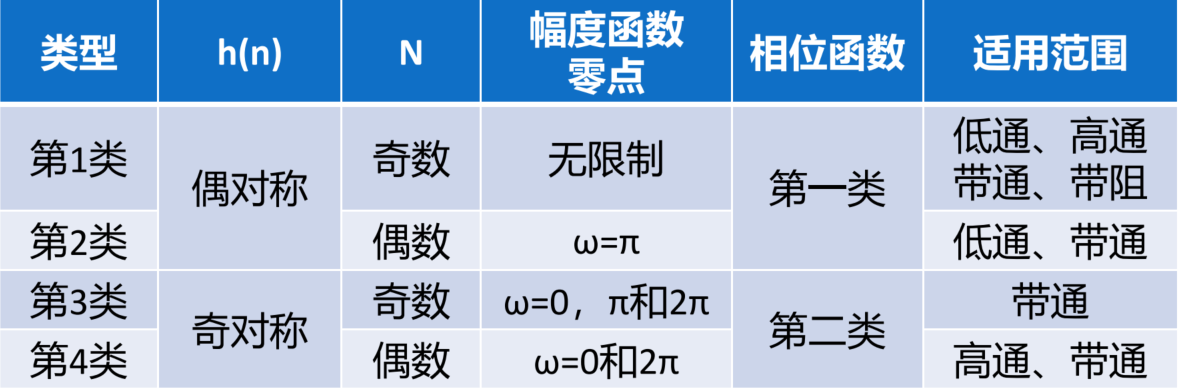
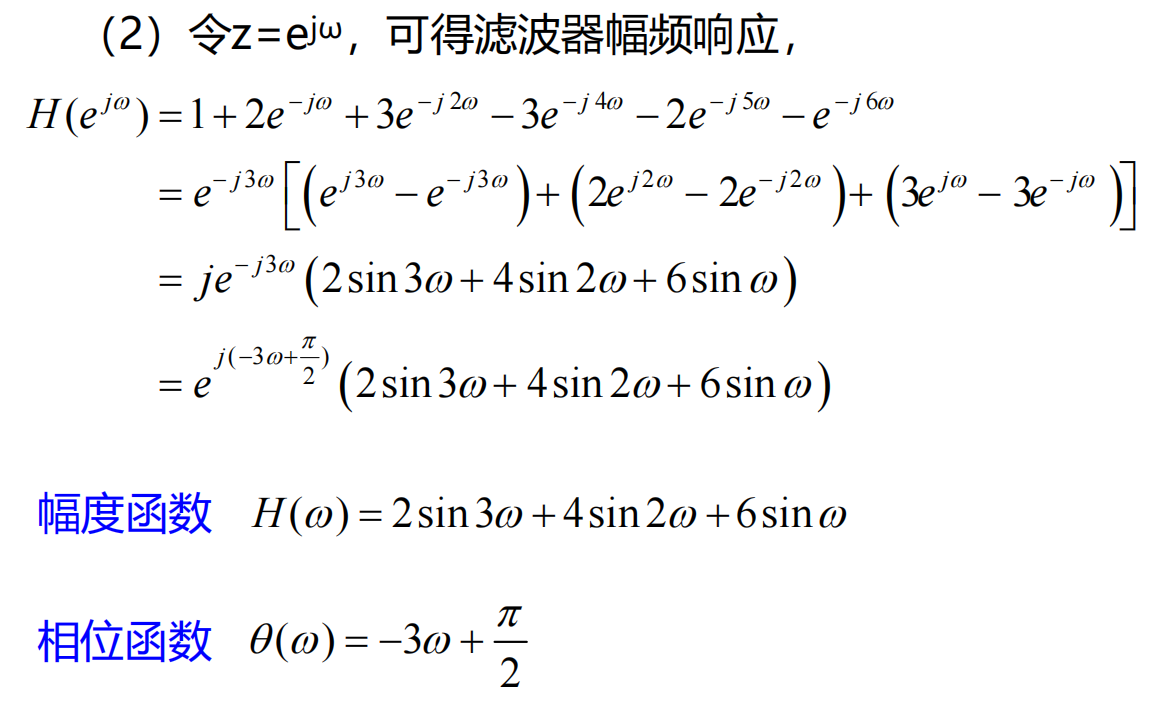
滤波器类型、幅度函数和相位函数
| 类型 | h(n) | N | 低通 | 高通 | 带通 | 带阻 |
|---|---|---|---|---|---|---|
| 第1类 | 偶 | 奇 | √ | √ | √ | √ |
| 第2类 | 偶 | 偶 | √ | × | √ | × |
| 第3类 | 奇 | 奇 | × | × | √ | × |
| 第4类 | 奇 | 偶 | × | √ | √ | × |
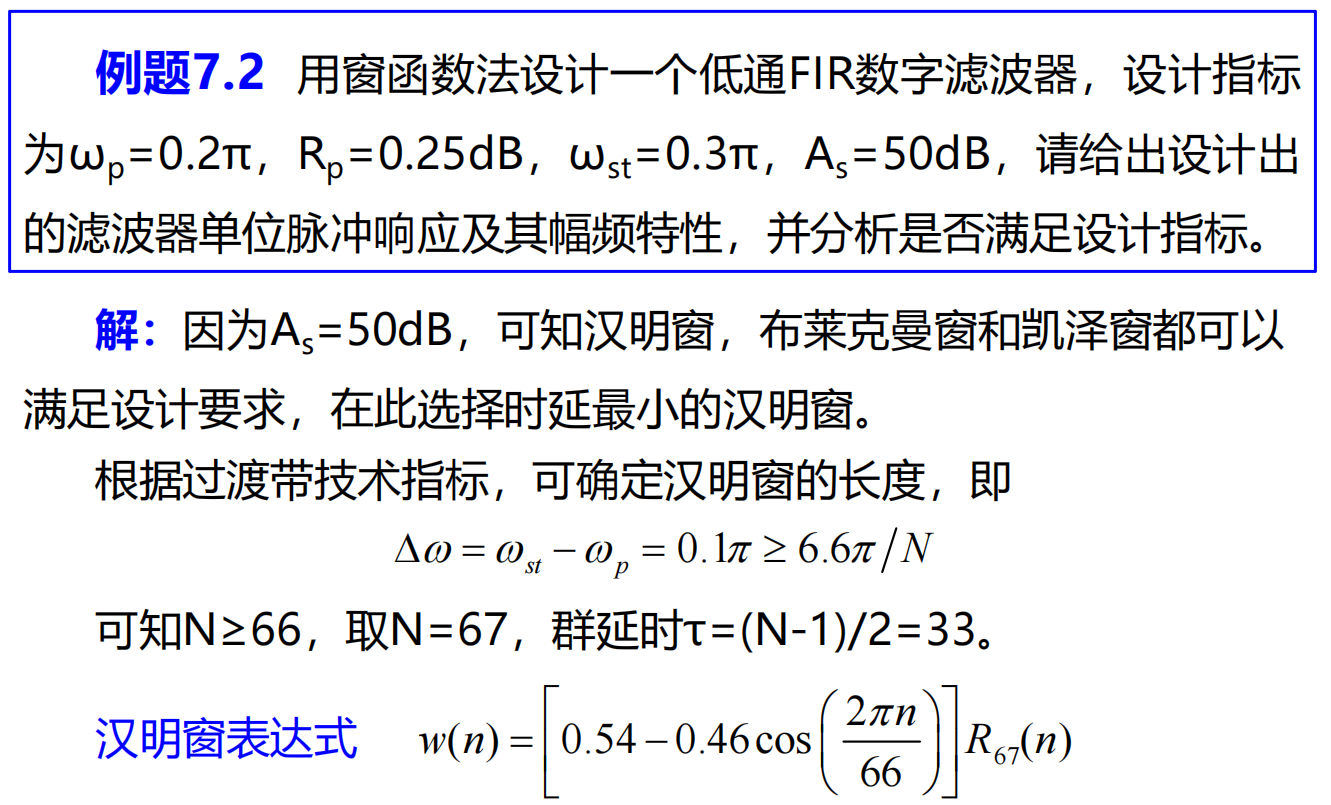
窗函数设计法
- 根据具体需求,确定FIR数字滤波器技术指标;
- 根据阻带最小衰减,确定窗函数类型;
- 根据过渡带宽,确定窗函数长度;
- 确定窗函数
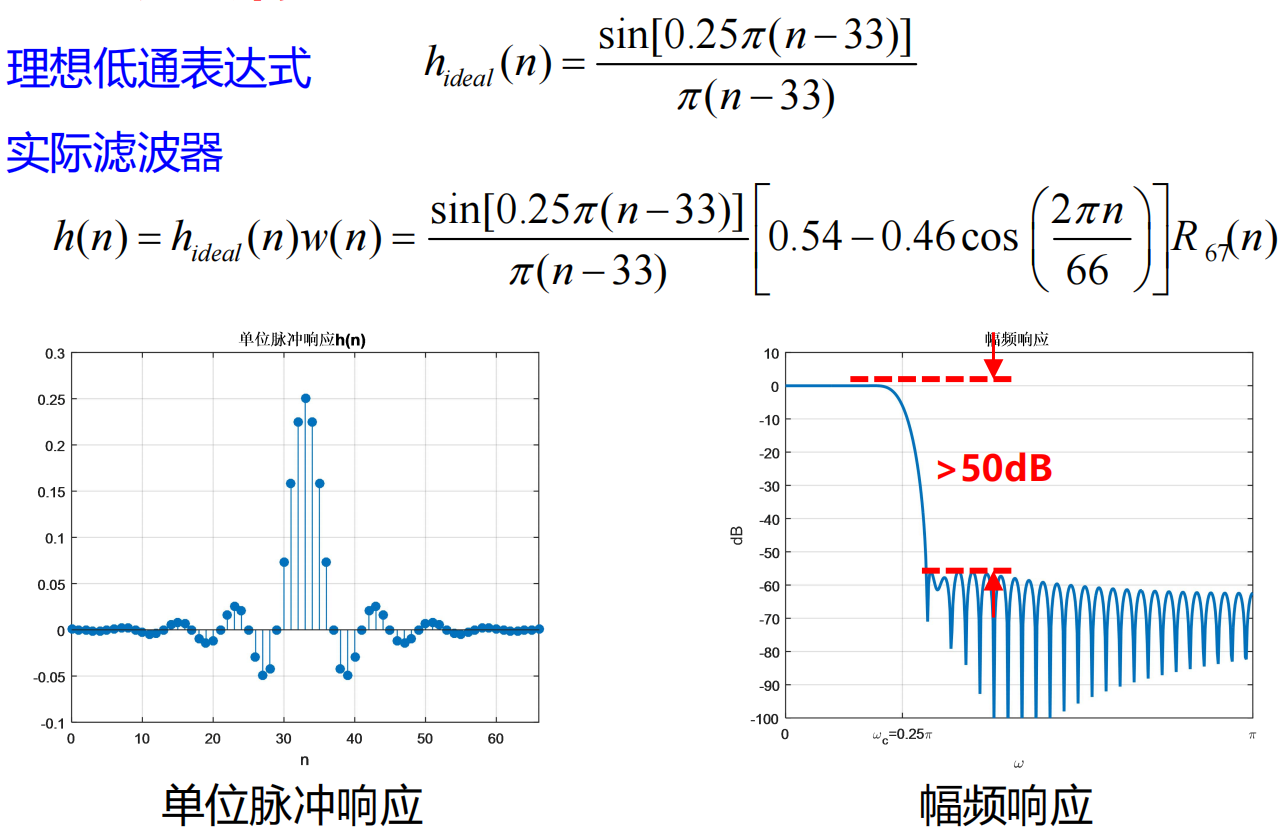
和理想滤波器 ; - 计算实际滤波器单位脉冲响应
; - 验证实际滤波器是否满足设计指标。
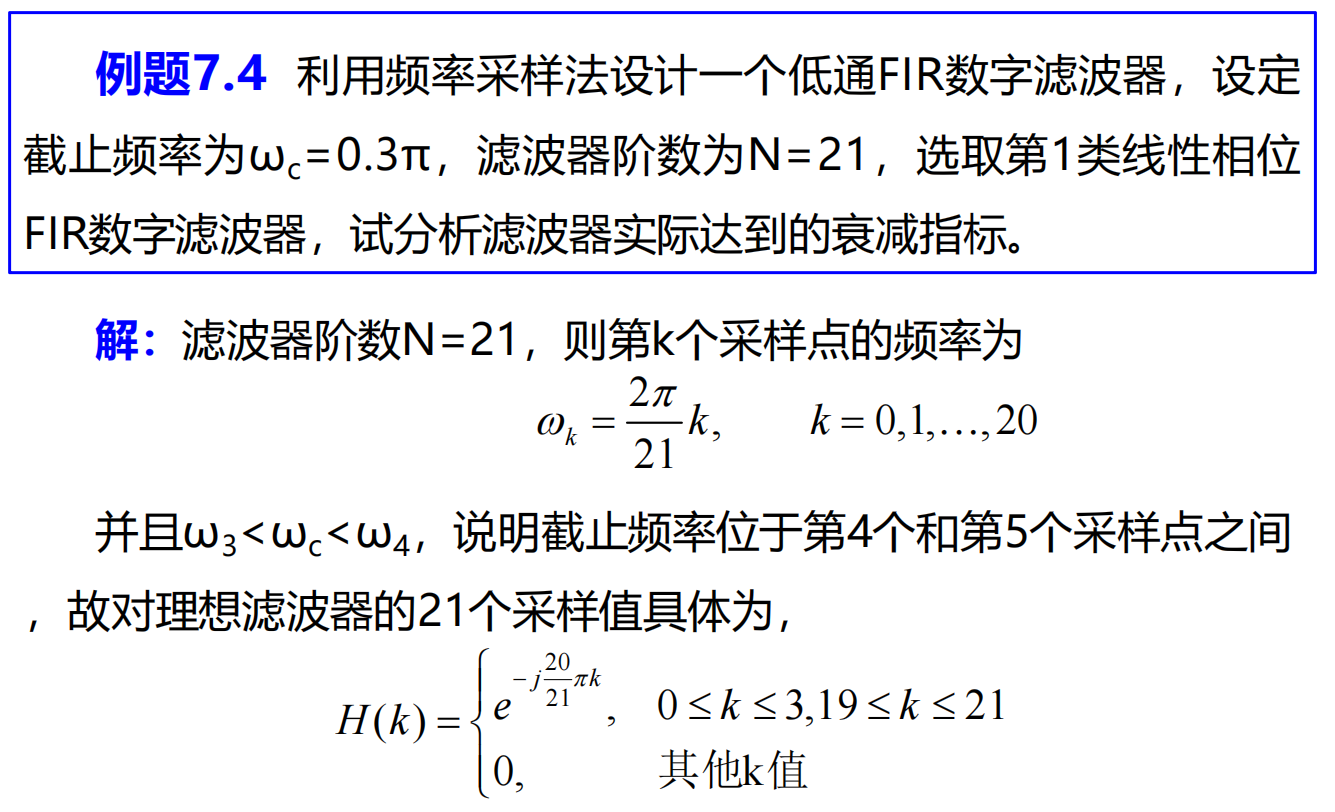
频率采样设计法
1:对理想滤波器的频率响应等间隔采样,
2:将采样值作为实际FIR滤波器频率响应样本值。
3:对H(k)进行IDFT,将得到的N点h(n)作为实际FIR滤波 器的单位脉冲响应,